Flying an FPV drone feels almost effortless when everything is working correctly—smooth turns, locked-in hovering, and instant response to stick inputs. But behind that “locked-in” feeling is a small sensor working at extreme speed: the gyroscope.
This article explains what a gyroscope is, how it works inside a drone, how it behaves in different flight modes, how it compares with other sensors like accelerometers and IMUs, and what real-world hardware choices actually matter.
What Is a Gyroscope in FPV Drones?
A gyroscope in an FPV drone is a high-speed motion sensor that measures rotational movement around three axes: yaw, pitch, and roll. It does not track where the drone is in space—it tracks how fast the drone is rotating.
Inside every flight controller, the gyroscope acts as the primary “motion awareness” sensor. It continuously tells the system whether the drone is tilting forward, rolling sideways, or spinning left and right.
In simple terms:
It does not measure position or speed
It measures rotation speed (angular velocity)
This distinction is critical. Because FPV drones are constantly moving and changing orientation, knowing rotation is more important than knowing absolute position. The flight controller uses this information to instantly adjust motor output and keep the aircraft stable or responsive.
Without a gyroscope, an FPV drone would have no idea what direction it is facing or how it is rotating, making controlled flight impossible.

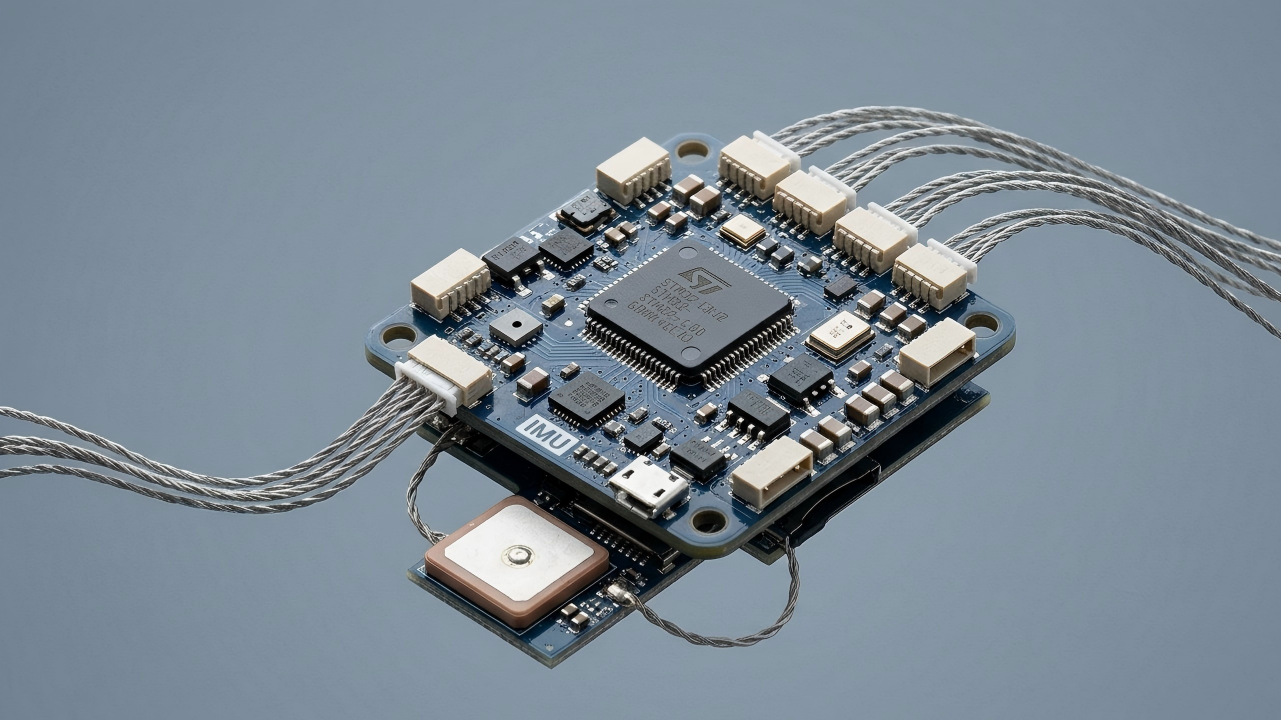
Fig. 1 FPV Flight Controller
How a Gyroscope Works in a FPV Drone
The Science of Gyroscope
At its core, a gyroscope is a micro-electromechanical system (MEMS) sensor that detects angular velocity, and in FPV drones it is embedded directly inside the flight controller, operating at extremely high frequency with thousands of readings per second. Each of these readings represents how fast the drone is rotating around its three main axes—X-axis for pitch movement, Y-axis for roll, and Z-axis for yaw—allowing the system to precisely understand even the smallest changes in orientation. Because these signals are extremely sensitive, the gyroscope can also pick up subtle vibrations caused by motors, propellers, or air turbulence, turning physical motion into continuous digital data.
Once this data is collected, the flight controller runs it through fast control algorithms that interpret the drone’s motion and instantly determine how motor speeds should be adjusted, and this entire process happens in real time, repeating thousands of times per second in a closed feedback loop where the drone moves or tilts, the gyroscope detects the rotation, the flight controller processes the data, the motors respond immediately, and the aircraft stabilizes or follows pilot input, which is exactly what keeps FPV drones airborne, stable, and fully controllable during flight.
Gyroscope vs Acro Mode vs Angle Mode
FPV drones behave differently depending on flight mode, and the gyroscope plays a different role in each.
In Angle Mode (Self-Leveling Flight), the gyroscope works together with the accelerometer to keep the drone level automatically.
- If you release the sticks, the drone returns to a flat position
- The accelerometer helps determine gravity direction
- The gyroscope ensures smooth rotational correction
- This mode is beginner-friendly and used for stable hovering or casual flying.
In Acro Mode (Manual Control), the gyroscope becomes the main control sensor, while the accelerometer is mostly ignored.
- No automatic leveling
- Drone rotates freely based on stick input
- Gyro only measures rotation rate, not correction
- This is the preferred mode for FPV freestyle and racing because it allows full control over flips, rolls, and aggressive maneuvers. In this mode, the gyroscope does not “stabilize” the drone—it simply reports motion so the flight controller can translate pilot input into motor output.
IMU vs Gyroscope vs Accelerometer
Understanding how these sensors work together is key to understanding modern FPV flight.
A gyroscope measures angular velocity, meaning how fast the drone is rotating around its yaw, pitch, and roll axes, making it the primary sensor for FPV control and real-time orientation tracking.
In contrast, an accelerometer measures linear acceleration and helps detect tilt relative to gravity, which is especially useful for maintaining stable orientation in Angle Mode where the drone self-levels automatically.
An IMU, or Inertial Measurement Unit, combines both the gyroscope and accelerometer into a single integrated system, allowing the flight controller to interpret both rotation and acceleration at the same time. Modern FPV systems rely on IMUs rather than standalone sensors because gyroscopes alone tend to drift over time, while accelerometers can become noisy during fast motion, so combining the two through sensor fusion significantly improves overall accuracy and stability. By merging these data streams, the IMU provides a continuous and reliable understanding of the drone’s movement in real time.

Fig. 2 FPV Drones
Common Gyroscopes and Comparison
In FPV drones, gyroscopes are not sold as standalone components. Instead, they are integrated into flight controllers as part of IMU chips.
Below is a simplified comparison of common gyro-related hardware used in FPV systems:
|
Chip / System |
Type |
Performance |
Usage |
Notes |
|
ICM-42688-P |
IMU (gyro + accel) |
High precision, low noise |
Modern flight controllers |
Widely used in premium builds |
|
MPU6000 |
IMU |
Very stable, older standard |
Racing drones |
Known for smooth “feel” |
|
BMI270 |
IMU |
Efficient, low power |
Lightweight builds |
Good for cinewhoops |
|
Dual-Gyro FCs |
System design |
Redundant sensing |
High-end controllers |
Marketed as crash-resistant |
|
Standalone Gyros |
Rare |
Not used in FPV |
Legacy systems |
Not practical for drones |
Note: In modern FPV systems, standalone gyroscopes are almost never used because they lack integration with accelerometers and flight control logic.
FAQs
1. Why You Shouldn’t Buy a Standalone Gyro for Modern FPV Quads
Standalone gyroscopes are not useful in FPV drones because they only measure rotation. Without accelerometers and flight controller integration, they cannot stabilize or control a drone. Modern IMU systems already include everything needed in a single chip, making standalone gyros unnecessary.
2. Does Gyro Quality Actually Matter for a Budget Cinewhoop?
Yes—but only to a point. Even budget IMUs today are accurate enough for stable flight. The bigger factors are vibration control, frame rigidity, and tuning. A poor frame will create noisy gyro data regardless of sensor quality, which leads to instability or “jello” effects in footage.
In most cases, improving mechanical build quality has more impact than upgrading the gyro itself.
3. Dual-Gyro Flight Controllers: Marketing Gimmick or Crash-Proof Feature?
Dual-gyro systems are sometimes used in high-end flight controllers for redundancy. In theory, they provide backup data if one sensor becomes noisy or unstable.
However, in real-world FPV use:
The benefit is often marginal
Software filtering already handles most noise
Mechanical vibration is a bigger issue than sensor failure
So while dual-gyro setups can add redundancy, they are not essential for most pilots and are often more of a premium feature than a necessity.
Conclusion
The gyroscope is the invisible foundation of every FPV drone flight. It constantly measures rotation, feeds data into the flight controller, and enables both stable hovering and aggressive freestyle performance.
Working together with accelerometers inside an IMU system, the gyroscope allows drones to understand motion in real time and react within milliseconds. Whether you are flying in calm cinematic mode or full acro freestyle, every movement depends on this tiny but powerful sensor. Without it, FPV drones would not feel responsive, stable, or even flyable at all.

{kind=link}
Leave a comment
This site is protected by hCaptcha and the hCaptcha Privacy Policy and Terms of Service apply.